This page was generated from unit-8.5-spacetime_unfitted/spacetime_unfitted.ipynb.
8.5 Space-time discretizations on unfitted geometries¶
In this tutorial, we want illustrate the unfitted space-time functionality of ngsxfem. To this end, we consider a convection-diffusion problem on a moving domain with a manufactured solution (and according right-hand side source term). To illustrate the setting, the simulation end result from ngsxfem is illustrated in the following video:
[1]:
%%html
<iframe width=100% height=600px src="https://www.youtube.com/embed/16emZemDZak?rel=0" frameborder="0" allow="autoplay; encrypted-media" allowfullscreen></iframe>
In this example we consider a moving domain problem with homogeneous Neumann boundary conditions:
We consider the Discountinuous Galerkin space-time discretization as discussed in [1, 2], which is of high order in space and time.
Literature:
[1]: F. Heimann, C. Lehrenfeld, J. Preuß. Geometrically Higher Order Unfitted Space-Time Methods for PDEs on Moving Domains. SIAM Journal on Scientific Computing, 45(2):B139–B165, 2023. doi: 10.1137/22M1476034
[2]:
from ngsolve import *
from netgen.geom2d import SplineGeometry
from xfem import *
from math import pi
from xfem.lset_spacetime import *
ngsglobals.msg_level = 1
#import netgen.gui
DrawDC = MakeDiscontinuousDraw(Draw)
importing ngsxfem-2.1.2606.dev0
Firstly, we pick some discretisation parameters:
[3]:
# DISCRETIZATION PARAMETERS:
# Parameter for refinement study:
i = 3
n_steps = 2**i
space_refs = i
# Polynomial order in time
k_t = 2
# Polynomial order in space
k_s = k_t
# Polynomial order in time for level set approximation
lset_order_time = k_t
# Integration order in time
time_order = 2 * k_t
# Time stepping parameters
tstart = 0
tend = 0.5
delta_t = (tend - tstart) / n_steps
maxh = 0.5
# Ghost-penalty parameter
gamma = 0.05
Background geometry and mesh:¶
We consider a simple square as background domain an use a simple mesh for that.
The space-time method uses tensor-product elements. Hence, we do not need space-time meshes.
[4]:
# Outer domain:
rect = SplineGeometry()
rect.AddRectangle([-0.6, -1], [0.6, 1])
ngmesh = rect.GenerateMesh(maxh=maxh, quad_dominated=False)
for j in range(space_refs):
ngmesh.Refine()
mesh = Mesh(ngmesh)
Generate Mesh from spline geometry
Handling of the time variable¶
For the handling of the space-time integration we use the following rules:
every time step is formulated with respect to the reference interval \([0,1)\) in time
Example: \(t_{n-1} = 0.4\), \(t=0.55\), \(\Delta t = 0.2\) \(\quad \longrightarrow \quad\) \(\hat{t} = 0.75\).
\(\hat{t}\) is the
ReferenceTimeVariable(tref)We define \(t_{old}(=t_{n-1})\) and \(\Delta t\) as a
Parameter, s.t. we can change the time interval later
[5]:
# Map from reference time to physical time
told = Parameter(tstart)
t = told + delta_t * tref
t.MakeVariable()
[5]:
<ngsolve.fem.CoefficientFunction at 0x7f94655e10d0>
Data functions (depending on \(t\))¶
[6]:
# Level set geometry
# Radius of disk (the geometry)
R = 0.5
# Position shift of the geometry in time
rho = (1 / (pi)) * sin(2 * pi * t)
# Convection velocity:
w = CoefficientFunction((0, rho.Diff(t)))
# Level set
r = sqrt(x**2 + (y - rho)**2)
levelset = r - R
# Diffusion coefficient
alpha = 1
# Solution
u_exact = cos(pi * r / R) * sin(pi * t)
# R.h.s.
coeff_f = (u_exact.Diff(t)
- alpha * (u_exact.Diff(x).Diff(x) + u_exact.Diff(y).Diff(y))
+ w[0] * u_exact.Diff(x) + w[1] * u_exact.Diff(y)).Compile()
A View on the time-dependent level set function on \([0,\)tend\(]\)¶
[7]:
r_one_timestep = sqrt(x**2 + (y - (1 / (pi)) * sin(2 * pi * tref * tend))**2)
levelset_one_timestep = r_one_timestep - R
#TimeSlider_Draw(levelset_one_timestep,mesh,autoscale=False,min=-0.02,max=0.02,deformation=True)
from helper import ProjectOnMultiDimGF
lset_to_show = ProjectOnMultiDimGF(levelset_one_timestep,mesh,order=3,sampling=8)
Draw(lset_to_show,mesh,"u_exact",autoscale=False,min=-0.5,max=1, interpolate_multidim=True, animate=True, deformation=True)
[7]:
WebGLScene
[8]:
u_exact_one_timestep = cos(pi * r_one_timestep / R) * sin(pi * tref * tend)
from helper import ProjectPairOnMultiDimGF
lset_cf_to_show = ProjectPairOnMultiDimGF(levelset_one_timestep, u_exact_one_timestep,mesh,order=3,sampling=8)
Draw(lset_cf_to_show,mesh,"u_exact",eval_function="value.x>0.0?value.z:value.y",autoscale=False,
min=-0.5,max=1, interpolate_multidim=True, animate=True)
[8]:
WebGLScene
Space-Time finite elements¶
For the construction of a space-time
FESpacewe can combine any spatialFESpacewith a scalarFiniteElementin a tensor-product fashion.Here, we use a nodal
FiniteElementto simplify the extraction of spatial functions at fixed times.
[9]:
# Spatial FESpace for solution
fes1 = H1(mesh, order=k_s, dgjumps=True)
# Time finite element (nodal!)
tfe = ScalarTimeFE(k_t)
# (Tensor product) space-time finite element space
st_fes = tfe * fes1
Levelset mesh adaptation class¶
In order to achieve higher order accuracy in space and time, a variant of the isoparametric mapping for stationary domains is applied.
[10]:
# Space time version of Levelset Mesh Adapation object. Also offers integrator
# helper functions that involve the correct mesh deformation
lsetadap = LevelSetMeshAdaptation_Spacetime(mesh, order_space=k_s,
order_time=lset_order_time,
threshold=0.5,
discontinuous_qn=True)
Space-Time version of the CutInfo class¶
The CutInfo class also works for space-time geometries. Its initialization is trivial:
[11]:
ci = CutInfo(mesh, time_order=0)
Note the argument time_order=0 which makes the CutInfo looking for space-time cut information afterwards.
In addition, we define a Bitarray for the facets of the mesh for later use in the definition of the Ghost-penalty stabilisation.
[12]:
ba_facets = BitArray(mesh.nfacet)
active_dofs = BitArray(st_fes.ndof)
To Update the slab geometry later on (for updated values of told) we do the following:
update of the isoparametric mapping
update of the cut information
update of facet markers
update of dof markers
[13]:
def UpdateTimeSlabGeometry():
lsetadap.CalcDeformation(levelset)
# Update markers in (space-time) mesh
ci.Update(lsetadap.levelsetp1[INTERVAL], time_order=0)
# re-compute the facets for stabilization:
ba_facets[:] = GetFacetsWithNeighborTypes(mesh,
a=ci.GetElementsOfType(HASNEG),
b=ci.GetElementsOfType(IF))
active_dofs[:] = GetDofsOfElements(st_fes, ci.GetElementsOfType(HASNEG))
Note that here the call of CalcDeformation of lsetadap entails the calculation of the P1 projection of the levelset function internally. The space-time P1-in-space level set approximation of lsetadap can be accessed by lsetadap.levelsetp1[timetype] where timetype is either INTERVAL which yields the space-time function or TOP or BOTTOM which yields the spatial P1 function that is obtained by restriction to either tref=1 or tref=0. Similarly the access to the
deformation is organized as lsetadap.deformation[timetype].
Solution GridFunction¶
[14]:
gfu = GridFunction(st_fes)
u_last = CreateTimeRestrictedGF(gfu, 1)
Variational formulation¶
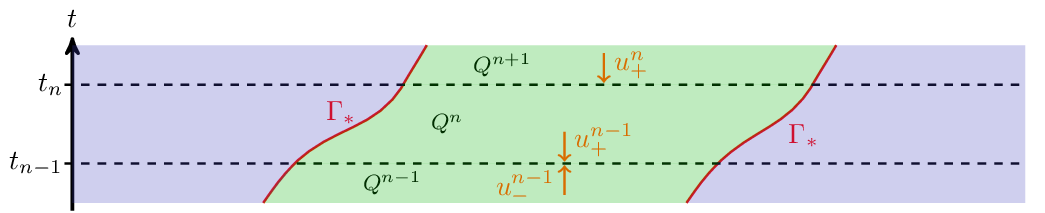
Now we would like to derive a suitable variational formulation on the time slabs \(Q^{n}\).
Due to homogeneous Neumann boundary conditions this leads to: \begin{equation*} (\partial_{t} u, v)_{Q^n} + \alpha (\nabla{u},\nabla{v})_{Q^n} + (w \cdot \nabla{u},v)_{Q^n} = (f,v)_{Q^n}. \end{equation*}
Upwind DG in time¶
In order to impose weak continuity in time, an upwind stabilisation is added, yielding
\begin{equation*} (\partial_{t} u, v)_{Q^n} + \alpha (\nabla{u},\nabla{v})_{Q^n} + (w \cdot \nabla{u},v)_{Q^n} + (u_{n−1}^+,v_{n−1}^+)_{\Omega^{n−1}} = (f,v)_{Q^n} + (u_{n−1}^-,v_{n−1}^+)_{\Omega^{n−1}}. \end{equation*}
Ghost penalty stabilization¶
To gain sufficient control on all space-time d.o.f.s we add a so-called Ghost-Penalty stabilization as in [1]. Adding the stabilization, the variational formulation on the time slabs becomes:
where \([\![u]\!]\) is the difference of \(u|_{T_1}\) and \(u|_{T_2}\) (interpreted as polynomials \(\in \mathbb{R}^d\)) and \(F_h\) is the set of facets on which the stabilization shall be applied. 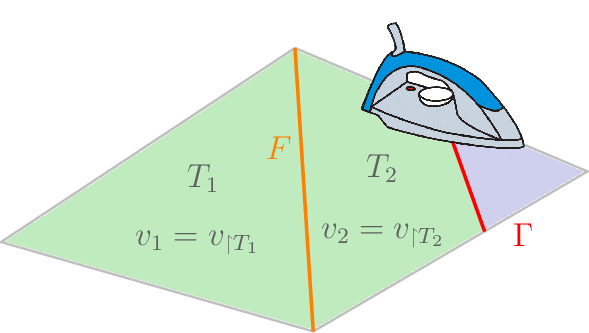
Implementation of space-time integrals¶
[15]:
u,v = st_fes.TnT()
h = specialcf.mesh_size
Transformation from reference interval to \((t_{n-1},t_n)\):¶
The transformation
implies the following for the time derivative.
[16]:
def dt(u):
return 1.0 / delta_t * dtref(u)
Next, we define integration region symbols, which are the numerical counterparts of the regions introduced above. Note that the levelset deformation is included to achieve higher order in space. The definedonelements information is not necessary (for the first three symbols), but helpful for efficiency reasons.
[17]:
dQ = delta_t * dCut(lsetadap.levelsetp1[INTERVAL], NEG, time_order=time_order,
deformation=lsetadap.deformation[INTERVAL],
definedonelements=ci.GetElementsOfType(HASNEG))
dOmold = dCut(lsetadap.levelsetp1[BOTTOM], NEG,
deformation=lsetadap.deformation[BOTTOM],
definedonelements=ci.GetElementsOfType(HASNEG), tref=0)
dOmnew = dCut(lsetadap.levelsetp1[TOP], NEG,
deformation=lsetadap.deformation[TOP],
definedonelements=ci.GetElementsOfType(HASNEG), tref=1)
dw = delta_t * dFacetPatch(definedonelements=ba_facets, time_order=time_order,
deformation=lsetadap.deformation[INTERVAL])
Now we setup the bilinear form and linear form corresponding to the previously described discrete variational formulation.
[18]:
a = RestrictedBilinearForm(st_fes, "a", check_unused=False,
element_restriction=ci.GetElementsOfType(HASNEG),
facet_restriction=ba_facets)
First integral: \((\partial_t u, v)_{Q^{n}}\)
[19]:
a += v * (dt(u) - dt(lsetadap.deform) * grad(u)) * dQ
Note that here, due to the time-dependent mesh deformation, the partial derivative in physical coordinates that we used in the formulation before corresponds to the partial derivative w.r.t. the reference configuration minus an additional mesh velocity contribution.
Second integral: \(\alpha (\nabla{u},\nabla{v})_{Q^{n}}\)
[20]:
a += alpha * InnerProduct(grad(u), grad(v)) * dQ
Third integral: \((v, \nabla{u} \cdot w)_{Q^{n}}\)
[21]:
a += v * w * grad(u) * dQ
Fourth integral: \((u_{n−1}^+,v_{n−1}^+)_{\Omega^{n−1}}\)
[22]:
a += u * v * dOmold
Fifth integral:
[23]:
a += h**(-2) * (1 + delta_t / h) * gamma * \
(u - u.Other()) * (v - v.Other()) * dw
Sixth integral: \((f,v)_{Q^{n}}\)
[24]:
f = LinearForm(st_fes)
f += coeff_f * v * dQ
Seventh integral: \((u_{n−1}^-,v_{n−1}^+)_{\Omega^{n−1}}\)
[25]:
f += u_last * v * dOmold
Solution of linear systems in every time step¶
setup the new linear system
solve the linear system
[26]:
def SolveForTimeSlab():
a.Assemble(reallocate=True)
f.Assemble()
inv = a.mat.Inverse(active_dofs)
gfu.vec.data = inv * f.vec.data
At the end of every time step, we¶
store the solution at \(t_n\) into a (purely) spatial
GridFunction(to be used in next time step)compute the error
update visualization
[27]:
def FinalizeStep(scene=None):
# Evaluate upper trace of solution for
# * for error evaluation
# * upwind-coupling to next time slab
RestrictGFInTime(spacetime_gf=gfu, reference_time=1.0, space_gf=u_last)
# Compute error at final time
l2error = sqrt(Integrate((u_exact - u_last)**2 * dOmnew, mesh))
print("\rt = {0:12.9f}, L2 error = {1:12.9e}".format(told.Get(), l2error), end="")
if scene:
scene.Redraw()
The final time loop¶
[28]:
scene = DrawDC(lsetadap.levelsetp1[TOP],u_last,-2, mesh,"u", autoscale=False, min = -2, max = 1, deformation = lsetadap.deformation[TOP])
Due to the mesh deformation changing (discontinuously) between time slabs, we have to project solutions from one time slab to the other. This is automatically done for all GridFunctions registered in lsetadap by ProjectOnUpdate.
[29]:
# Set initial values
u_last.Set(fix_tref(u_exact, 0))
# Project u_last at the beginning of each time step
lsetadap.ProjectOnUpdate(u_last)
told.Set(0)
gf_lset_to_show = GridFunction(H1(mesh, order=1),multidim=0)
gf_u_to_show = GridFunction(u_last.space,multidim=0)
timestep = 0
md_comps = 0
with TaskManager():
while tend - told.Get() > delta_t/2:
UpdateTimeSlabGeometry()
if timestep % 1 == 0:
gf_lset_to_show.AddMultiDimComponent(lsetadap.levelsetp1[BOTTOM].vec)
gf_u_to_show.AddMultiDimComponent(u_last.vec)
md_comps += 1
SolveForTimeSlab()
timestep += 1
told.Set(told.Get() + delta_t)
FinalizeStep(scene)
gf_lset_to_show.AddMultiDimComponent(lsetadap.levelsetp1[TOP].vec)
gf_u_to_show.AddMultiDimComponent(u_last.vec)
print("")
t = 0.500000000, L2 error = 3.273189062e-01
[30]:
from helper import MultiDimPairToGF
gf_pair_to_show = MultiDimPairToGF(gf_lset_to_show,gf_u_to_show,mesh,sampling=md_comps)
Draw(gf_pair_to_show, mesh,"uh",eval_function="value.x>0.0?value.z:value.y",autoscale=False,
min=-0.5,max=1, interpolate_multidim=True, animate=True)
[30]:
WebGLScene
Play around suggestions:
use other orders in space or time (and a coarse grid)
use different level set evolutions
Further material:
Take a look at the demos in demos/spacetime of the ngsxfem repository.