This page was generated from unit-8.3-cutfem/cutfem.ipynb.
8.3 Unfitted FEM discretizations¶
We want to solve a geometrically unfitted model problem for a stationary domain.
We use a level set description (cf. basics.ipynb):
and use a piecewise linear approximation as a starting point in the discretization (cf. intlset.ipynb for a discussion of geometry approximations).
We first import the related packages:
[1]:
# the constant pi
from math import pi
# ngsolve stuff
from ngsolve import *
# basic xfem functionality
from xfem import *
# basic geometry features (for the background mesh)
from netgen.geom2d import SplineGeometry
# visualization stuff
from ngsolve.webgui import *
importing ngsxfem-2.1.2606.dev0
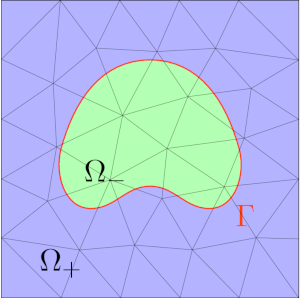
Interface problem¶
We want to solve a problem of the form:
[2]:
square = SplineGeometry()
square.AddRectangle([-1.5,-1.5],[1.5,1.5],bc=1)
mesh = Mesh (square.GenerateMesh(maxh=0.4, quad_dominated=False))
levelset = (sqrt(x*x+y*y) - 1.0)
DrawDC(levelset, -3.5, 2.5, mesh,"levelset")
lsetp1 = GridFunction(H1(mesh,order=1))
InterpolateToP1(levelset,lsetp1)
DrawDC(lsetp1, -3.5, 2.5, mesh, "lsetp1")
[2]:
WebGLScene
Cut FE spaces¶
For the discretization we use standard background FESpaces restricted to the subdomains:
composed |
inner |
outer |
|---|---|---|
|
|
|
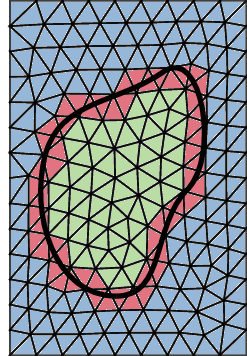
In NGSolve we simply take the product space \(V_h \times V_h\) but mark the irrelevant dofs using the CutInfo-class:
[3]:
Vh = H1(mesh, order=2, dirichlet=".*")
VhG = FESpace([Vh,Vh])
ci = CutInfo(mesh, lsetp1)
freedofs = VhG.FreeDofs()
freedofs &= CompoundBitArray([GetDofsOfElements(Vh,ci.GetElementsOfType(HASNEG)),
GetDofsOfElements(Vh,ci.GetElementsOfType(HASPOS))])
gfu = GridFunction(VhG)
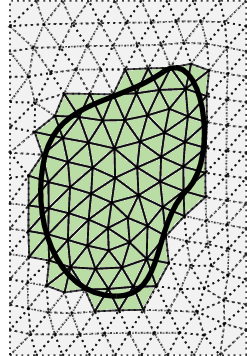
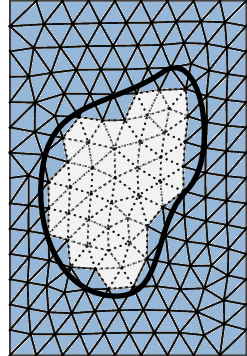
Let us visualize active dofs:¶
active dofs of first space are set to -1
active dofs of second space are set to 1
inactive dofs are 0
[4]:
gfu.components[0].Set(CoefficientFunction(-1))
gfu.components[1].Set(CoefficientFunction(1))
for i, val in enumerate(freedofs):
if not val:
gfu.vec[i] = 0.0
[5]:
Draw(gfu.components[0], mesh, "background_uneg")
[5]:
WebGLScene
[6]:
Draw(gfu.components[1], mesh, "background_upos")
[6]:
WebGLScene
Only the parts which are in the corresponding subdomain are relevant. The solution \(u\) is:
[7]:
DrawDC(lsetp1, gfu.components[0], gfu.components[1], mesh, "u")
[7]:
WebGLScene
Improvement: use Compress to reduce unused dofs¶
[8]:
Vh = H1(mesh, order=2, dirichlet=[1,2,3,4])
ci = CutInfo(mesh, lsetp1)
VhG = FESpace([Compress(Vh,GetDofsOfElements(Vh,ci.GetElementsOfType(cdt))) for cdt in [HASNEG,HASPOS]])
freedofs = VhG.FreeDofs()
gfu = GridFunction(VhG)
gfu.components[0].Set(1)
gfu.components[1].Set(-1)
DrawDC(lsetp1, gfu.components[0], gfu.components[1], mesh, "u")
print(Vh.ndof, VhG.components[0].ndof, VhG.components[1].ndof)
281 136 256
Nitsche discretization¶
For the discretization of the interface problem we consider the Nitsche formulation:
for all \(v \in V_h^\Gamma\).
For this formulation we require:
a suitably defined average operator \(\{ \cdot \} = \kappa_+ (\cdot)|_{\Omega_{+}} + \kappa_- (\cdot)|_{\Omega_{-}}\)
a suitable definition of the normal direction
numerical integration on \(\Omega_{+}^{lin}\), \(\Omega_{-}^{lin}\) and \(\Gamma^{lin}\)
Cut ratio field¶
For the average we use the "Hansbo"-choice:
This "cut ratio" field is provided by the CutInfo class:
[9]:
kappaminus = CutRatioGF(ci)
kappa = (kappaminus, 1-kappaminus)
Draw(kappaminus, mesh, "kappa")
[9]:
WebGLScene
Normal direction¶
The normal direction is obtained from the (interpolated) level set function:
[10]:
n = Normalize(grad(lsetp1))
Draw(n, mesh, "normal", vectors={'grid_size': 20})
[10]:
WebGLScene
Averages and jumps¶
Based on the background finite elements we can now define the averages and jumps:
[11]:
h = specialcf.mesh_size
alpha = [1.0,20.0]
# Nitsche stabilization parameter:
stab = 20*(alpha[1]+alpha[0])/h
# expressions of test and trial functions (u and v are tuples):
u,v = VhG.TnT()
average_flux_u = sum([- kappa[i] * alpha[i] * grad(u[i]) * n for i in [0,1]])
average_flux_v = sum([- kappa[i] * alpha[i] * grad(v[i]) * n for i in [0,1]])
jump_u = u[0] - u[1]
jump_v = v[0] - v[1]
Integrals¶
To integrate only on the subdomains or the interface with a symbolic expression, you have to use the dCut differentail symbol, cf. intlset.ipynb. (Only) to speed up assembly we can mark the integrals as undefined where they would be zero anyway:
[12]:
dx_neg = dCut(levelset=lsetp1, domain_type=NEG, definedonelements=ci.GetElementsOfType(HASNEG))
dx_pos = dCut(levelset=lsetp1, domain_type=POS, definedonelements=ci.GetElementsOfType(HASPOS))
ds = dCut(levelset=lsetp1, domain_type=IF, definedonelements=ci.GetElementsOfType(IF))
We first integrate over the subdomains:
[13]:
a = BilinearForm(VhG, symmetric = True)
a += alpha[0] * grad(u[0]) * grad(v[0]) * dx_neg
a += alpha[1] * grad(u[1]) * grad(v[1]) * dx_pos
We then integrate over the interface:
[14]:
a += (average_flux_u * jump_v + average_flux_v * jump_u + stab * jump_u * jump_v) * ds
Finally, we integrate over the subdomains to get the linear form:
[15]:
coef_f = [1,0]
f = LinearForm(VhG)
f += coef_f[0] * v[0] * dx_neg
f += coef_f[1] * v[1] * dx_pos
Assembly¶
[16]:
a.Assemble()
f.Assemble()
[16]:
<ngsolve.comp.LinearForm at 0x7f482eb26830>
We can now solve the problem (recall that freedofs only marks relevant dofs):
[17]:
# homogenization of boundary data and solution of linear system
def SolveLinearSystem():
gfu.vec[:] = 0
f.vec.data -= a.mat * gfu.vec
gfu.vec.data += a.mat.Inverse(freedofs) * f.vec
SolveLinearSystem()
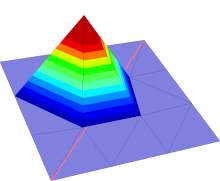
DrawDC(lsetp1, gfu.components[0], gfu.components[1], mesh, "u", min=0, max=0.25)
[17]:
WebGLScene
Higher order accuracy¶
In the previous example we used a second order FESpace but only used a second order accurate geometry representation (due to \(\phi_h^{lin}\)).
We can improve this by applying a mesh transformation technique, cf. intlset.ipynb:

[18]:
# for isoparametric mapping
from xfem.lsetcurv import *
lsetmeshadap = LevelSetMeshAdaptation(mesh, order=2)
deformation = lsetmeshadap.CalcDeformation(levelset)
Draw(deformation, mesh, "deformation")
# alternatively to passing the deformation to dCut me can do the mesh deformation by hand
mesh.deformation = deformation
a.Assemble()
f.Assemble()
mesh.deformation = None
SolveLinearSystem()
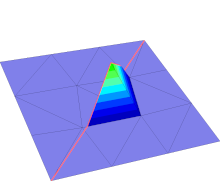
DrawDC(lsetp1, gfu.components[0], gfu.components[1], mesh, "u", deformation=deformation, min=0, max=0.25)
uh = IfPos(lsetp1, gfu.components[1], gfu.components[0])
deform_graph = CoefficientFunction((deformation[0], deformation[1], 4*uh))
DrawDC(lsetp1, gfu.components[0], gfu.components[1], mesh, "graph_of_u", deformation=deform_graph, min=0, max=0.25)
[18]:
WebGLScene
XFEM spaces¶
Instead of the CutFEM space
we can use the (same) space with an XFEM characterization:
with the space \(V_h^x\) which adds the necessary enrichments.
In ngsxfem we can also work with this XFEM spaces:
[19]:
Vh = H1(mesh, order=2, dirichlet=[1,2,3,4])
Vhx = XFESpace(Vh,ci)
VhG = FESpace([Vh,Vhx])
original |
after cut |
|---|---|
|
|
The space
Vhxcopies all shape functions fromVhon cut (IF) elements (and stores a sign (NEG/POS))The sign determines on which domain the shape function should be supported (and where not)
Advantage: every dof is an active dof (i.e. no dummy dofs)
Need to express \(u_+\) and \(u_-\) in terms of \(u_h^{std}\) and \(u_h^x\):
\(u_- = u_h^{std} +\)
neg(\(u_h^x\)) and \(u_+ = u_h^{std} +\)pos(\(u_h^x\))
negandposfilter out the right shape functions ofVhx
[20]:
### express xfem shape functions as cutFEM shape functions:
(u_std,u_x), (v_std, v_x) = VhG.TnT()
u = [u_std + op(u_x) for op in [neg,pos]]
v = [v_std + op(v_x) for op in [neg,pos]]
Similar examples and extensions (python demo files)¶
In the source directory (or on http://www.github.com/ngsxfem/ngsxfem ) you can find in the demos directory a number of more advanced examples (with fewer explanatory comments). These are:
unf_interf_prob.py: Similar to this notebook. The file implements low and high order geometry approximation and gives the choice between a CutFEM and XFEM discretisation.fictdom.py: Fictitious domain/CutFEM diffusion problem (one domain only) with ghost penalty stabilization.fictdom_dg.py: Fictitious domain/CutFEM diffusion problem with a discontiunous Galerkin discretisation and ghost-penalty stabilization.ficdom_mlset.py: Fictitious domain/CutFEM diffusion problem with a geometry described by multiple level set funcions.stokesxfem.py: Stokes interface problem with using XFEM and a Nitsche formulation.tracefem.pyor tracefem_scalar.ipynb : A scalar Laplace-Beltrami problem on a level set surface in 3d using a trace finite element discretization (PDE on the interface only).lsetgeoms.py: Shows a number of pre-implemented 3d level set geometries.moving_domain.py: A scalar convection-diffusion problem posed on a moving domain discretised with an Eulerian time-stepping scheme.aggregates/fictdom_aggfem.py: Fictitious domain/CutFEM diffusion problem (one domain only) with aggregation of FE spacesaggregates/fictdom_dg_aggfem.py: Fictitious domain/CutFEM diffusion with DG discretization and cell aggregationspacetime/spacetimeCG_unfitted.py: A scalar unfitted PDE problem on a moving domain, discretized with CG-in-time space-time finite elements.spacetime/spacetimeDG_unfitted.py: AsspacetimeCG_unfitted.pybut with a DG-in-time space-time discretisation.spacetime/spacetimeDG_fitted.py: A fitted FEM heat equation solved using DG-in-time space-time finite elements.spacetime/spacetime_vtk.py: Demonstration to generate space-time VTK outputs.mpi/mpi_nxfem.py: Same problem asunf_interf_prob.py(XFEM + higher order) campatible with MPI parallisation.