3.3 Discontinuous Galerkin Discretizations¶
We are solving the scalar linear transport problem
Find \(u: [0,T] \to V_D := \{ u \in L^2(\Omega), b \cdot \nabla u \in L^2(\Omega), u|_{\Gamma_{in}} = u_D\}\), s.t.
In [1]:
import netgen.gui
%gui tk
from math import pi
from ngsolve import *
As a first example, we consider the unit square \((0,1)^2\) and the advection velocity \(b = (1,2)\). Accordingly the inflow boundary is \(\Gamma_{in} = \{ x \cdot y = 0\}\).
In [2]:
from netgen.geom2d import SplineGeometry
geo = SplineGeometry()
geo.AddRectangle( (0, 0), (1, 1),
bcs = ("bottom", "right", "top", "left"))
mesh = Mesh( geo.GenerateMesh(maxh=0.2))
We consider an Upwind DG discretization (in space):
Find \(u: [0,T] \to V_h := \bigoplus_{T\in\mathcal{T}_h} \mathcal{P}^k(T)\) so that
Here \(\hat{u}\) is the Upwind flux, i.e. \(\hat{u} = u\) on the outflow boundary part \(\partial T_{out} = \{ x\in \partial T \mid b(x) \cdot n_T(x) \geq 0 \}\) of \(T\) and \(\hat{u} = u^{other}\) else, with \(u^{other}\) the value from the neighboring element.
There is quite a difference in the computational costs (compared to a standard DG formulation) depending on the question if the solution of linear systems is involved or only operator evaluations (explicit method). We treat both cases separately:
- Case 1: Solution of the time-dependent problem by explicit time stepping
- Case 2: Solution of the stationary problem
Case 1: Explicit time stepping with a DG formulation¶
Explicit Euler:
In our first example we set \(u_0 = f = 0\).
Computing convection applications \(C u^n\)¶
- We can define the bilinear form without setting up a matrix with storage.
- A
BilinearFormis allowed to be nonlinear in the 1st argument (for operator applications) - For the DG formulation we require integrals on element boundaries, keyword: ``element_boundary``
- To distinguish inflow from outflow we evaluate
\(b \cdot \mathbf{n}\). Here the normal \(\mathbf{n}\) is
available as a
specialcf - To make cases with
CoefficientFunctionswe use theIfPos-CoefficientFunction. ``IfPos(a,b,c)``.adecides on the evaluation. Ifais positivebis evaluated, otherwisec. - To access the neighbor function we can use
u.Other() - To incorporate boundary conditions (\(\hat{u}\) on inflow
boundaries), we can use the argument
bndof.Other(bnd). If there is no neighbor element (boundary!) theCoefficientFunctionbndis evaluated.
In [3]:
b = CoefficientFunction((1,2))
n = specialcf.normal(mesh.dim)
ubnd = IfPos(x,1,0)
V = L2(mesh,order=2)
u,v = V.TrialFunction(), V.TestFunction()
c = BilinearForm(V)
c += SymbolicBFI( b * grad(u) * v)
c += SymbolicBFI( IfPos( (b*n), 0, (b*n) * (u.Other(ubnd)-u)) * v, element_boundary=True)
gfu_expl = GridFunction(V)
Draw(gfu_expl,mesh,"u_explicit")
res = gfu_expl.vec.CreateVector()
c.Apply(gfu_expl.vec,res)
Solving mass matrix problems¶
- Need to invert the mass matrix
- For DG methods the mass matrix is block diagonal, often even diagonal.
- In
NGSolve,FESpaces can provide a routineSolveMwhich realizes the operation \(M^{-1} u\).
In [4]:
t = 0
dt = 0.001
tend = 1
while t < tend-0.5*dt:
c.Apply(gfu_expl.vec,res)
V.SolveM(res,CoefficientFunction(1.0))
gfu_expl.vec.data -= dt * res
t += dt
Redraw(blocking=True)
Case 2: Solving linear systems with a DG formulation¶
When it comes to solving linear systems with a DG formulation we have to change the way the sparsity pattern is typically constructed.
Sparsity patterns in NGSolve¶
- sparsity pattern of a standard FEM and DG matrix is different
- In
NGSolvethe sparsity pattern is set up whenever aBilinearFormis assembled - the sparsity pattern is based on the finite element space only (and not the integrators!).
Two cases: * standard FEM formulation (element-based couplings only) *
DG formulations (element- and facet-based couplings) (dgjumps=True)
1. Standard formulation¶
- In a standard formulation unknowns only have a nonzero entry if the support of corresponding basis functions overlap
- In
NGSolvethis sparsity pattern is obtained by allocating nonzero entries whenever two unknowns have an association with the same element.
The idea is sketched here for one dof:
dof \(\to\) elements of dof = [el:math:_1,dots,el\(_n\)] \(\to\) dofs of (el:math:_1) \(\cup \dots \cup\) dofs of (el:math:_n).
2. DG formulation (‘dgjumps’)¶
- In a DG formulation couplings (nonzero entries) are introduced also for basis functions which do not have overlapping support.
- An additional mechanism (keyword:
dgjumps) has been introduced to determine the sparsity pattern. - This can be activated by adding the
dgjumpsflags to theFESpace. - We do not need the flag if we do not set up matrices (explicit time ste pping).
- A
dgjumps-formulation introduced additional couplings through facets, i.e. for all dofs that associate to the same facet a nonzero entry is reserved.
The idea is sketched here for one dof:
dof \(\to\) facets of dof = [fac:math:_1,dots,fac\(_n\)] \(\to\) dofs of (fac:math:_1) \(\cup \dots \cup\) dofs of (fac:math:_n).
Note that ‘dofs of facet \(F\)‘ is always larger than ‘dofs of element \(T\)‘ if \(F \subset \partial T\).
We want to demonstrate the difference in the sparsity pattern with a simple comparison in the next block
In [5]:
try:
V1 = L2(mesh,order=0)
a1 = BilinearForm(V1)
a1.Assemble()
V2 = L2(mesh,order=0, dgjumps=True)
a2 = BilinearForm(V2)
a2.Assemble()
import scipy.sparse as sp
import matplotlib.pylab as plt
plt.rcParams['figure.figsize'] = (12, 12)
a1.mat.AsVector()[:] = 1 # set every entry to 1
rows,cols,vals = a1.mat.COO()
A1 = sp.csr_matrix((vals,(rows,cols)))
a2.mat.AsVector()[:] = 1 # set every entry to 1
rows,cols,vals = a2.mat.COO()
A2 = sp.csr_matrix((vals,(rows,cols)))
fig = plt.figure()
ax1 = fig.add_subplot(121)
ax2 = fig.add_subplot(122)
ax1.spy(A1)
ax2.spy(A2)
except ImportError:
pass
non-dgjumps vs dgjumps¶
In [6]:
try:
plt.show()
except ImportError:
pass
- when assembling a
BilinearFormthe bilinear form has to be linear in both arguments again (Linearizations will be addressed later) ...Other(bnd=..)does not make sense any more- when setting up the system we require
LinearFormandBilinearForms separately to implement boundary conditions.
In [7]:
b = CoefficientFunction((1,2))
n = specialcf.normal(mesh.dim)
ubnd = IfPos(x,1,0)
V = L2(mesh,order=2, dgjumps=True)
a = BilinearForm(V)
u,v = V.TrialFunction(), V.TestFunction()
a += SymbolicBFI( b * grad(u) * v)
a += SymbolicBFI( IfPos( (b*n), 0, (b*n) * (u.Other()-u)) * v, element_boundary=True)
a.Assemble()
f = LinearForm(V)
f += SymbolicLFI( (b*n) * IfPos( (b*n), 0, -ubnd) * v, BND, skeleton=True)
f.Assemble()
In [8]:
gfu_impl = GridFunction(V)
gfu_impl.vec.data = a.mat.Inverse() * f.vec
Draw(gfu_impl,mesh,"u_implicit")
Remarks on sparsity pattern in NGSolve¶
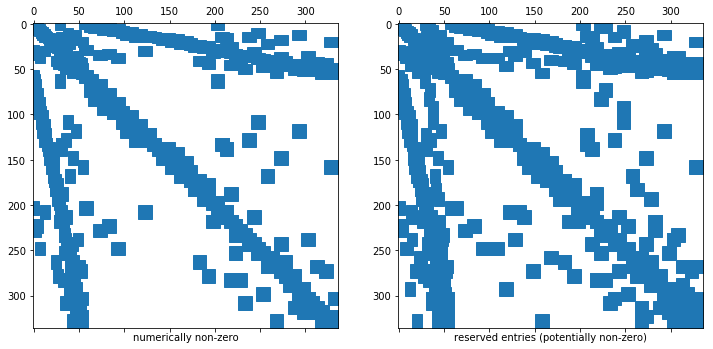
Remark 1: The sparsity pattern is set up a-priorily¶
- The sparsity pattern of a sparse matrix in NGSolve is independent of its entries (it’s set up a-priorily).
- We can have “nonzero” entries that have the value
Below we show the reserved memory for the sparse matrix and the (numerically) non-zero entries in this sparse matrix.
(you need matplotlib/scipy for this block - but can ignore it otherwise)
In [9]:
try:
import scipy.sparse as sp
import matplotlib.pylab as plt
plt.rcParams['figure.figsize'] = (12, 12)
rows,cols,vals = a.mat.COO()
A1 = sp.csr_matrix((vals,(rows,cols)))
A2 = A1.copy()
A2.data[:] = 1
fig = plt.figure()
ax1 = fig.add_subplot(121); ax2 = fig.add_subplot(122)
ax1.set_xlabel("numerically non-zero")
ax1.spy(A1)
ax2.set_xlabel("reserved entries (potentially non-zero)")
ax2.spy(A2)
plt.show()
except ImportError:
pass
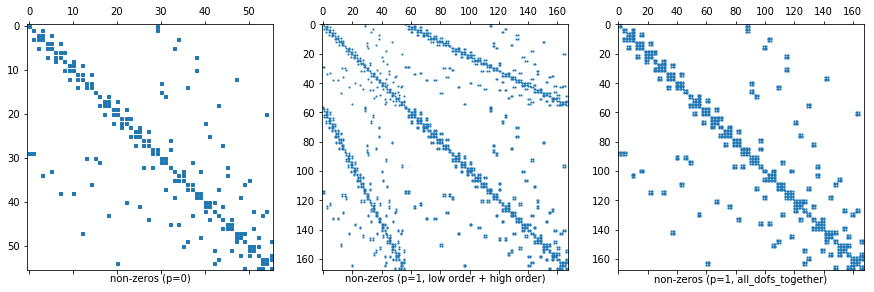
Remark 2: Dof numbering of higher order FESpaces¶
- In
NGSolveFESpaces typically have a numbering where the first block of dofs corresponds to a low order subspace (which is convenient for iterative solvers). - For L2 this means that the first dofs correspond to the constants on elements.
- You can turn this behavior off for some spaces, e.g. for L2 by adding
the flag
all_dofs_together.
We demonstrate this in the next comparison:
(you need matplotlib/scipy for this block - but can ignore it otherwise)
In [10]:
try:
V0 = L2(mesh,order=0,dgjumps=True)
a0 = BilinearForm(V0)
a0.Assemble()
V1 = L2(mesh,order=1,dgjumps=True)
a1 = BilinearForm(V1)
a1.Assemble()
V2 = L2(mesh,order=1,dgjumps=True, all_dofs_together=True)
a2 = BilinearForm(V2)
a2.Assemble()
import scipy.sparse as sp
import matplotlib.pylab as plt
plt.rcParams['figure.figsize'] = (15, 15)
a0.mat.AsVector()[:] = 1 # set every entry to 1
rows,cols,vals = a0.mat.COO()
A0 = sp.csr_matrix((vals,(rows,cols)))
a1.mat.AsVector()[:] = 1 # set every entry to 1
rows,cols,vals = a1.mat.COO()
A1 = sp.csr_matrix((vals,(rows,cols)))
a2.mat.AsVector()[:] = 1 # set every entry to 1
rows,cols,vals = a2.mat.COO()
A2 = sp.csr_matrix((vals,(rows,cols)))
fig = plt.figure()
ax1 = fig.add_subplot(131)
ax2 = fig.add_subplot(132)
ax3 = fig.add_subplot(133)
ax1.set_xlabel("non-zeros (p=0)")
ax1.spy(A0,markersize=3)
ax2.set_xlabel("non-zeros (p=1, low order + high order)")
ax2.spy(A1,markersize=1)
ax3.set_xlabel("non-zeros (p=1, all_dofs_together)")
ax3.spy(A2,markersize=1)
except ImportError:
pass
In [11]:
try:
plt.show()
except ImportError:
pass
Supplementary 1: Skeleton formulation¶
So far we considered the DG formulation with integrals on the boundary of each element. Instead one could formulate the problem in terms of facet integrals where every facet appears only once.
Then, the corresponding formulation is:
Find \(u: [0,T] \to V_h := \bigoplus_{T\in\mathcal{T}_h} \mathcal{P}^k(T)\) so that
Here \(\mathcal{F}^{int}\) is the set of interior facets and \(\mathcal{F}^{inflow}\) is the set of boundary facets where \(b \cdot \mathbf{n} < 0\). \(v^{downwind}\) is the function on the downwind side of the facet and \(u^{inflow}\) is the inflow boundary condition.
In NGSolve these integrals can be assembled with skeleton=True. The
facet integrals are divided into interior facets and exterior (boundary)
facet. Hence, we add BND/VOL:
In [12]:
b = CoefficientFunction((1,2))
n = specialcf.normal(mesh.dim)
ubnd = IfPos(x,1,0)
V = L2(mesh,order=2)
u,v = V.TrialFunction(), V.TestFunction()
c = BilinearForm(V)
c += SymbolicBFI( b * grad(u) * v)
bn = b*n
vin = IfPos(bn,v.Other(),v)
c += SymbolicBFI( bn*(u.Other() - u) * vin, VOL, skeleton=True)
c += SymbolicBFI( IfPos(bn, 0, bn) * (u.Other(ubnd) - u) * v, BND, skeleton=True)
gfu_expl = GridFunction(V)
Draw(gfu_expl,mesh,"u_explicit")
res = gfu_expl.vec.CreateVector()
c.Apply(gfu_expl.vec,res)
In [13]:
t = 0
dt = 0.001
tend = 1
while t < tend-0.5*dt:
c.Apply(gfu_expl.vec,res)
V.SolveM(res,rho=CoefficientFunction(1.0))
gfu_expl.vec.data -= dt * res
t += dt
Redraw(blocking=True)
Supplementary 2: DG for Diffusion¶
DG formulation for the Poisson problem
For the non-conforming discretization we use the \(L^2\) space and the (symmetric) interior penalty method: Find \(u \in V_h := \bigoplus_{T\in\mathcal{T}_h} \mathcal{P}^k(T)\) so that
where \(\{\!\!\{\cdot\}\!\!\}\) and \([\![ \cdot ]\!]\) are the usual average and jump operators across facets.
In [14]:
n = specialcf.normal(mesh.dim)
h = specialcf.mesh_size
IfPos(x-y,0,1)
source = IfPos(x-y,5,-5)
order=2
V = L2(mesh,order=order,dgjumps=True)
a = BilinearForm(V)
u,v = V.TrialFunction(), V.TestFunction()
a += SymbolicBFI( grad(u) * grad(v))
def avg_flux(u):
return 0.5*(-grad(u)*n-grad(u.Other())*n)
def jump(u):
return u-u.Other()
alpha = 5 * order * (order+1)
a += SymbolicBFI( avg_flux(u) * jump(v) + avg_flux(v) * jump(u) + alpha/h * jump(u) * jump(v), VOL, skeleton=True)
a += SymbolicBFI( - grad(u)*n*v - grad(v)*n*u + alpha/h * u * v, BND, skeleton=True)
a.Assemble()
f = LinearForm(V)
f += SymbolicLFI( (- grad(v)*n + alpha/h * v) * ubnd, BND, skeleton=True)
f += SymbolicLFI( source * v)
f.Assemble()
gfu_impl = GridFunction(V)
gfu_impl.vec.data = a.mat.Inverse() * f.vec
Draw(gfu_impl,mesh,"u_implicit")