3.2 Incompressible Navier-Stokes equations¶
We are solving the unsteady Navier Stokes equations
Find \((u,p):[0,T] \to (H_{0,D}^1)^d \times L^2\), s.t.
In [1]:
import netgen.gui
%gui tk
import tkinter
from math import pi
from ngsolve import *
from netgen.geom2d import SplineGeometry
Schäfer-Turek benchmark¶
We consider the benchmark setup of from http://www.featflow.de/en/benchmarks/cfdbenchmarking/flow/dfg_benchmark2_re100.html . The geometry is a 2D channel with a circular obstacle which is positioned (only slightly) off the center of the channel. The geometry:

The viscosity is set to \(\nu = 10^{-3}\).
In [2]:
from netgen.geom2d import SplineGeometry
geo = SplineGeometry()
geo.AddRectangle( (0, 0), (2, 0.41), bcs = ("wall", "outlet", "wall", "inlet"))
geo.AddCircle ( (0.2, 0.2), r=0.05, leftdomain=0, rightdomain=1, bc="cyl")
mesh = Mesh( geo.GenerateMesh(maxh=0.08))
mesh.Curve(3)
# viscosity
nu = 0.001
Taylor-Hood velocity-pressure pair¶
We use a Taylor-Hood discretization of degree \(k\). The finite element space for the (vectorial) velocity \(\mathbf{u}\) and the pressure \(p\) are:
In [3]:
k = 3
V = VectorH1(mesh,order=k, dirichlet="wall|cyl|inlet")
Q = H1(mesh,order=k-1)
X = FESpace([V,Q])
The VectorH1 is the product space of two H1 spaces with
convenience operators for identity, grad and div.
Stokes problem for initial values¶
Find \(\mathbf{u} \in \mathbf{V}\), \(p \in Q\) so that
with boundary conditions: * the inflow boundary data (‘inlet’) with mean value \(1\)
- “do-nothing” boundary conditions on the ouflow (‘outlet’) and
- homogeneous Dirichlet conditions on all other boundaries (‘wall’).
In [4]:
gfu = GridFunction(X)
velocity = CoefficientFunction (gfu.components[0])
Draw(velocity,mesh,"u")
Draw(gfu.components[1],mesh,"p")
# parabolic inflow at bc=1:
uin = CoefficientFunction((1.5*4*y*(0.41-y)/(0.41*0.41),0))
gfu.components[0].Set(uin, definedon=mesh.Boundaries("inlet"))
Redraw()
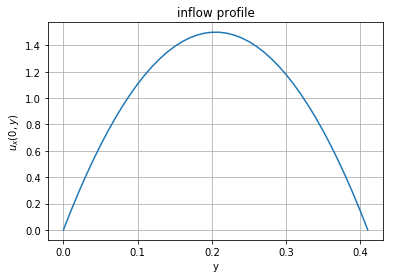
inflow profile plot:¶
In [5]:
try :
# a sketch of the inflow profile:
import matplotlib
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
s = np.arange(0.0, 0.42, 0.01)
bvs = 6*s*(0.41-s)/(0.41)**2
plt.plot(s, bvs)
plt.xlabel('y')
plt.ylabel('$u_x(0,y)$')
plt.title('inflow profile')
plt.grid(True)
plt.show()
except ImportError:
pass
To solve the Stokes (and later the Navier-Stokes) problem, we introduce the bilinear form:
In [6]:
u,p = X.TrialFunction()
v,q = X.TestFunction()
a = BilinearForm(X)
stokes = nu*InnerProduct(grad(u),grad(v))-div(u)*q-div(v)*p
a += SymbolicBFI(stokes)
a.Assemble()
f = LinearForm(X)
f.Assemble()
inv_stokes = a.mat.Inverse(X.FreeDofs())
res = f.vec.CreateVector()
res.data = f.vec - a.mat*gfu.vec
gfu.vec.data += inv_stokes * res
Redraw()
IMEX time discretization¶
For the time integration we consider an semi-implicit Euler method (IMEX) where the convection is treated only explicitly and the remaing part implicitly:
Find \((\mathbf{u}^{n+1},p^{n+1}) \in X = \mathbf{V} \times Q\), s.t. for all \((\mathbf{v},q) \in X = \mathbf{V} \times Q\)
with
and
We prefer the incremental form (as it homogenizes the boundary conditions):
In [7]:
dt = 0.001
# matrix for implicit Euler
mstar = BilinearForm(X)
mstar += SymbolicBFI(InnerProduct(u,v) + dt*stokes)
mstar.Assemble()
inv = mstar.mat.Inverse(X.FreeDofs())
velocity = gfu.components[0]
absvelocity = Norm(velocity)
conv = LinearForm(X)
conv += SymbolicLFI(InnerProduct(grad(gfu.components[0])*velocity,v))
In [8]:
t = 0
tend = 0
In [9]:
# implicit Euler/explicit Euler splitting method:
tend += 1
while t < tend-0.5*dt:
print ("\rt=", t, end="")
conv.Assemble()
res.data = a.mat * gfu.vec + conv.vec
gfu.vec.data -= dt * inv * res
t = t + dt
Redraw()
t= 0.999000000000000876
Supplementary 1: Computing stresses¶
In the previously used benchmark the stresses on the obstacle are evaluated, the so-called drag and lift coefficients.
The force acting on the obstacle is
The drag/lift coefficients are
where \(\bar{u} = 1\) is the mean inflow velocity and \(L = 0.41\) is the channel width.
We use the residual of our discretization to compute the forces. On the boundary degrees of freedoms of the disk we overwrote the equation by prescribing the (homogeneous) boundary conditions. The equations related to these dofs describe the force (im)balance at this boundary.
Testing the residual (functional) with the characteristic function on that boundary (in the x- or y-direction) we obtain the integrated stresses (in the x- or y-direction):
We define the functions which are characteristic functions (in terms of boundary evaluations)
In [10]:
drag_x_test = GridFunction(X)
drag_x_test.components[0].Set(CoefficientFunction((-20.0,0)), definedon=mesh.Boundaries("cyl"))
drag_y_test = GridFunction(X)
drag_y_test.components[0].Set(CoefficientFunction((0,-20.0)), definedon=mesh.Boundaries("cyl"))
We will collect drag and lift forces over time and therefore create empty arrays
and reset initial data (and time)
In [11]:
time_vals = []
drag_x_vals = []
drag_y_vals = []
In [12]:
# restoring initial data
res.data = f.vec - a.mat*gfu.vec
gfu.vec.data += inv_stokes * res
t = 0
tend = 0
With the same discretization as before.
Remarks: * you can call the following block several times to continue a simulation and collect more data * note that you can reset the array without rerunning the simulation
In [13]:
# implicit Euler/explicit Euler splitting method:
tend += 1
while t < tend-0.5*dt:
print ("\rt=", t, end="")
conv.Assemble()
res.data = a.mat * gfu.vec + conv.vec
gfu.vec.data -= dt * inv * res
t = t + dt
Redraw()
time_vals.append( t )
drag_x_vals.append(InnerProduct(res, drag_x_test.vec) )
drag_y_vals.append(InnerProduct(res, drag_y_test.vec) )
#print(drag)
t= 0.999000000000000876
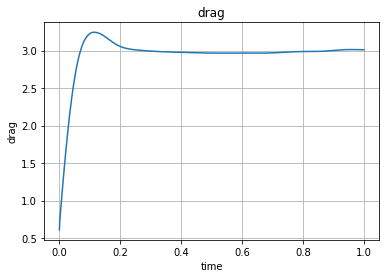
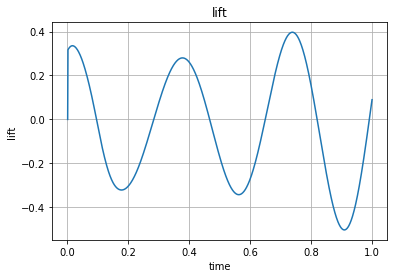
Below you can plot the gathered drag and lift values:
In [14]:
# Plot drag/lift forces over time
try:
import matplotlib
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
plt.plot(time_vals, drag_x_vals)
plt.xlabel('time')
plt.ylabel('drag')
plt.title('drag')
plt.grid(True)
plt.show()
plt.plot(time_vals, drag_y_vals)
plt.xlabel('time')
plt.ylabel('lift')
plt.title('lift')
plt.grid(True)
plt.show()
except:
pass