This page was generated from unit-6.1.3-rmplate/Reissner_Mindlin_plate.ipynb.
6.1.3 Reissner-Mindlin plate¶
To avoid shear locking when the thickness \(t\) becomes small several methods and elements have been proposed. We discuss two approaches:
1: Mixed Interpolation of Tensorial Components (MITC)
2: Rotations in Nèdèlec space using the Tangential-Displacement Normal-Normal-Stress method (TDNNS)
Mixed Interpolation of Tensorial Components (MITC)¶
[1]:
from ngsolve import *
from netgen.geom2d import SplineGeometry
from ngsolve.webgui import Draw
Set up benchmark example with exact solution. Young modulus \(E\), Poisson ratio \(\nu\), shear correction factor \(\kappa\) and corresponding Lamè parameters \(\mu\) and \(\lambda\). Geometry parameters are given by thickness \(t\) and radius \(R\).
[2]:
E, nu, k = 10.92, 0.3, 5/6
mu = E/(2*(1+nu))
lam = E*nu/(1-nu**2)
#shearing modulus
G = E/(2*(1+nu))
#thickness, shear locking with t=0.1
t = 0.1
R = 5
#force
fz = 1
order = 1
Due to symmetry we only need to mesh one quarter of the circle.
[3]:
sg = SplineGeometry()
pnts = [ (0,0), (R,0), (R,R), (0,R) ]
pind = [ sg.AppendPoint(*pnt) for pnt in pnts ]
sg.Append(['line',pind[0],pind[1]], leftdomain=1, rightdomain=0, bc="bottom")
sg.Append(['spline3',pind[1],pind[2],pind[3]], leftdomain=1, rightdomain=0, bc="circ")
sg.Append(['line',pind[3],pind[0]], leftdomain=1, rightdomain=0, bc="left")
mesh = Mesh(sg.GenerateMesh(maxh=R/3))
mesh.Curve(order)
Draw(mesh)
[3]:
WebGLScene
Depending on the boundary conditions (simply supported or clamped) we have different exact solutions for the vertical displacement.
[4]:
r = sqrt(x**2+y**2)
xi = r/R
Db = E*t**3/(12*(1-nu**2))
clamped = True
#exact solution for simply supported bc
w_s_ex = -fz*R**4/(64*Db)*(1-xi**2)*( (6+2*nu)/(1+nu) - (1+xi**2) + 8*(t/R)**2/(3*k*(1-nu)))
#Draw(w_s_ex, mesh, "w_s_ex")
#exact solution for clamped bc
w_c_ex = -fz*R**4/(64*Db)*(1-xi**2)*( (1-xi**2) + 8*(t/R)**2/(3*k*(1-nu)))
Draw(w_c_ex, mesh, "w_c_ex")
[4]:
WebGLScene
Use (lowest order) Lagrangian finite elements for rotations and the vertical deflection together with additional internal bubbles for order >1.
[5]:
if clamped:
fesB = VectorH1(mesh, order=order, orderinner=order+1, dirichletx="circ|left", dirichlety="circ|bottom", autoupdate=True)
else:
fesB = VectorH1(mesh, order=order, orderinner=order+1, dirichletx="left", dirichlety="bottom", autoupdate=True)
fesW = H1(mesh, order=order, orderinner=order+1, dirichlet="circ", autoupdate=True)
fes = FESpace( [fesB, fesW], autoupdate=True )
(beta,u), (dbeta,du) = fes.TnT()
Direct approach where shear locking may occur
Adding interpolation (reduction) operator \(\boldsymbol{R}:[H^1_0(\Omega)]^2\to H(\text{curl})\). Spaces are chosen according to [Brezzi, Fortin and Stenberg. Error analysis of mixed-interpolated elements for Reissner-Mindlin plates. Mathematical Models and Methods in Applied Sciences 1, 2 (1991), 125-151.]
[6]:
Gamma = HCurl(mesh,order=order,orderedge=order-1, autoupdate=True)
a = BilinearForm(fes)
a += t**3/12*(2*mu*InnerProduct(Sym(grad(beta)),Sym(grad(dbeta))) + lam*div(beta)*div(dbeta))*dx
#a += t*k*G*InnerProduct( grad(u)-beta, grad(du)-dbeta )*dx
a += t*k*G*InnerProduct(Interpolate(grad(u)-beta,Gamma), Interpolate(grad(du)-dbeta,Gamma))*dx
f = LinearForm(fes)
f += -fz*du*dx
gfsol = GridFunction(fes, autoupdate=True)
gfbeta, gfu = gfsol.components
WARNING: kwarg 'orderedge' is an undocumented flags option for class <class 'ngsolve.comp.HCurl'>, maybe there is a typo?
Define function for solving the problem.
[7]:
def SolveBVP():
fes.Update()
gfsol.Update()
with TaskManager():
a.Assemble()
f.Assemble()
inv = a.mat.Inverse(fes.FreeDofs(), inverse="sparsecholesky")
gfsol.vec.data = inv * f.vec
Solve, compute error, refine, …
[8]:
l = []
for i in range(5):
print("i = ", i)
SolveBVP()
if clamped:
norm_w = sqrt(Integrate(w_c_ex*w_c_ex, mesh))
err = sqrt(Integrate((gfu-w_c_ex)*(gfu-w_c_ex), mesh))/norm_w
else:
norm_w = sqrt(Integrate(w_s_ex*w_s_ex, mesh))
err = sqrt(Integrate((gfu-w_s_ex)*(gfu-w_s_ex), mesh))/norm_w
print("err = ", err)
l.append ( (fes.ndof, err ))
mesh.Refine()
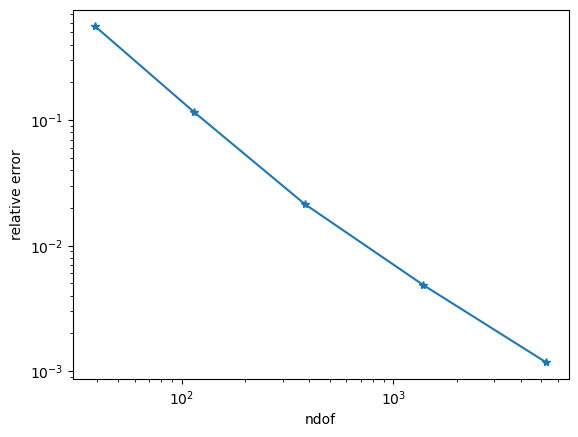
i = 0
err = 0.5595598334579152
i = 1
err = 0.11654484017075904
i = 2
err = 0.02144878939739583
i = 3
err = 0.004856535560585913
i = 4
err = 0.0011748158744003172
Convergence plot with matplotlib.
[9]:
import matplotlib.pyplot as plt
plt.yscale('log')
plt.xscale('log')
plt.xlabel("ndof")
plt.ylabel("relative error")
ndof,err = zip(*l)
plt.plot(ndof,err, "-*")
plt.ion()
plt.show()
TDNNS method¶
Invert material law of Hooke and reset mesh.
[10]:
def CMatInv(mat, E, nu):
return (1+nu)/E*(mat-nu/(nu+1)*Trace(mat)*Id(2))
mesh = Mesh(sg.GenerateMesh(maxh=R/3))
mesh.Curve(order)
Draw(mesh)
[10]:
WebGLScene
Instead of using Lagrangian elements together with an interpolation operator we can directly use H(curl) for the rotation \(\beta\).
[11]:
order=1
if clamped:
fesB = HCurl(mesh, order=order-1, dirichlet="circ", autoupdate=True)
fesS = HDivDiv(mesh, order=order-1, dirichlet="", autoupdate=True)
else:
fesB = HCurl(mesh, order=order-1)
fesS = HDivDiv(mesh, order=order-1, dirichlet="circ", autoupdate=True)
fesW = H1(mesh, order=order, dirichlet="circ", autoupdate=True)
fes = FESpace( [fesW, fesB, fesS], autoupdate=True )
(u,beta,sigma), (du,dbeta,dsigma) = fes.TnT()
Use the TDNNS method with the stress (bending) tensor \(\boldsymbol{\sigma}\) as proposed in [Pechstein and Schöberl. The TDNNS method for Reissner-Mindlin plates. Numerische Mathematik 137, 3 (2017), 713-740] \begin{align*} &\mathcal{L}(u,\beta,\boldsymbol{\sigma})=-\frac{6}{t^3}\|\boldsymbol{\sigma}\|^2_{\mathcal{C}^{-1}} + \langle \boldsymbol{\sigma}, \nabla \beta\rangle + \frac{tkG}{2}\|\nabla u-\beta\|^2 -\int_{\Omega} f\cdot u\,dx\\ &\langle \boldsymbol{\sigma}, \nabla \beta\rangle:= \sum_{T\in\mathcal{T}}\int_T\boldsymbol{\sigma}:\nabla \beta\,dx -\int_{\partial T}\boldsymbol{\sigma}_{nn}\beta_n\,ds \end{align*}
[12]:
n = specialcf.normal(2)
a = BilinearForm(fes)
a += (-12/t**3*InnerProduct(CMatInv(sigma, E, nu),dsigma) + InnerProduct(dsigma,grad(beta)) + InnerProduct(sigma,grad(dbeta)))*dx
a += ( -((sigma*n)*n)*(dbeta*n) - ((dsigma*n)*n)*(beta*n) )*dx(element_boundary=True)
a += t*k*G*InnerProduct( grad(u)-beta, grad(du)-dbeta )*dx
f = LinearForm(fes)
f += -fz*du*dx
gfsol = GridFunction(fes, autoupdate=True)
gfu, gfbeta, gfsigma = gfsol.components
[13]:
def SolveBVP():
fes.Update()
gfsol.Update()
with TaskManager():
a.Assemble()
f.Assemble()
inv = a.mat.Inverse(fes.FreeDofs())
gfsol.vec.data = inv * f.vec
Solve, compute error, and refine.
[14]:
l = []
for i in range(5):
print("i = ", i)
SolveBVP()
if clamped:
norm_w = sqrt(Integrate(w_c_ex*w_c_ex, mesh))
err = sqrt(Integrate((gfu-w_c_ex)*(gfu-w_c_ex), mesh))/norm_w
else:
norm_w = sqrt(Integrate(w_s_ex*w_s_ex, mesh))
err = sqrt(Integrate((gfu-w_s_ex)*(gfu-w_s_ex), mesh))/norm_w
print("err = ", err)
l.append ( (fes.ndof, err ))
mesh.Refine()
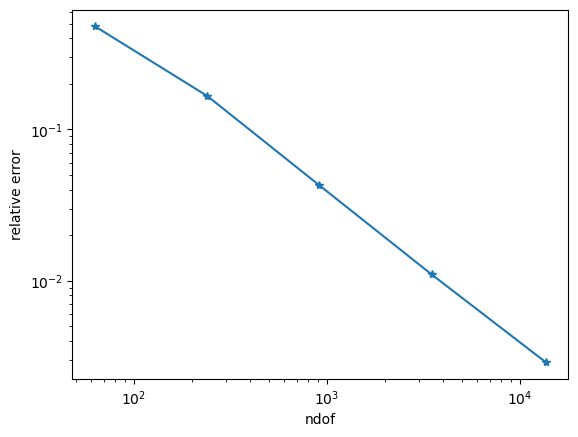
i = 0
err = 0.48069152680541993
i = 1
err = 0.16608403907801983
i = 2
err = 0.04302102328015352
i = 3
err = 0.011002228686864074
i = 4
err = 0.0028879335074872142
Convergence plot with matplotlib.
[15]:
plt.yscale('log')
plt.xscale('log')
plt.xlabel("ndof")
plt.ylabel("relative error")
ndof,err = zip(*l)
plt.plot(ndof,err, "-*")
plt.ion()
plt.show()
[ ]: