This page was generated from unit-3.4-simplehyp/shallow2D.ipynb.
3.4 A Nonlinear conservation law: shallow water equation in 2D¶
We consider the shallow water equations as an example of a nonlinear conservation law, i.e. we consider
with
and
Jacobian of the flux for shallow water:¶
\begin{align*} \mathbf{A}_1 & = \left(\begin{array}{ccc} 0 & 1 & 0 \\ - \frac{\mathbf{u}_2^2}{\mathbf{u}_1^2} + g \mathbf{u}_1 & 2 \frac{\mathbf{u}_2}{\mathbf{u}_1} & 0 \\ - \frac{\mathbf{u}_2 \mathbf{u}_3}{\mathbf{u}_1^2} & \frac{\mathbf{u}_3}{\mathbf{u}_1} & \frac{\mathbf{u}_2}{\mathbf{u}_1} \end{array} \right) = \left( \begin{array}{ccc} 0 & 1 & 0 \\ - u^2 + g h & 2 u & 0 \\ - u v & v & u \end{array} \right) \end{align*}
\begin{align*} \mathbf{A}_2 & = \left( \begin{array}{ccc} 0 & 0 & 1 \\ - \frac{\mathbf{u}_2\mathbf{u}_3}{\mathbf{u}_1^2} & \frac{\mathbf{u}_3}{\mathbf{u}_1} & \frac{\mathbf{u}_2}{\mathbf{u}_1} \\ - \frac{\mathbf{u}_3^2}{\mathbf{u}_1^2} + g \mathbf{u}_1 & 0 & 2\frac{\mathbf{u}_3}{\mathbf{u}_1} \end{array} \right) = \left( \begin{array}{ccc} 0 & 0 & 1 \\ - uv & v & u \\ - v^2 + gh & 0 & 2 v \end{array} \right) \end{align*}
\begin{align*} \mathbf{A}(\mathbf{u}, \mathbf{n}) & = n_1 \mathbf{A}_1 + n_2 \mathbf{A}_2 = \left( \begin{array}{ccc} 0 & n_1 & n_2 \\ - u \alpha - g h n_1 & \alpha + u n_1 & u n_2 \\ - v \alpha - g h n_2 & v n_1 & \alpha + v n_2 \end{array} \right), \quad \text{ with } \alpha = (\mathbf{u}, \mathbf{n}), \end{align*}
spectrum:
[1]:
from ngsolve import * # sloppy
import netgen.gui
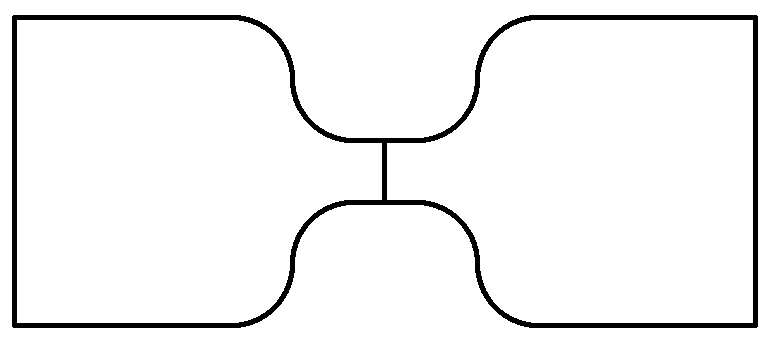
The dam break problem (geometry)¶
[2]:
from netgen.geom2d import SplineGeometry
geo = SplineGeometry()
pnts =[ (-12,-5), (-7,-5), (-5,-5), (-3,-5), (-3,-3),
(-3,-1), (-1,-1), ( 0,-1), ( 1,-1), ( 3,-1),
( 3,-3), ( 3,-5), ( 5,-5), ( 7,-5), ( 12,-5),
( 12, 5), ( 7, 5), ( 5, 5), ( 3, 5), ( 3, 3),
( 3, 1), ( 1, 1), ( 0, 1), (-1, 1), (-3, 1),
(-3, 3), (-3, 5), (-5, 5), (-7, 5), (-12, 5)]
pnts = [geo.AppendPoint(*pnt) for pnt in pnts]
[3]:
curves = [[["line",0,1],"wall",1, 0], [["line",1,2],"wall",1, 0],
[["spline3",2,3,4],"wall",1, 0],[["spline3",4,5,6],"wall",1, 0],[["line",6,7],"wall",1, 0],
[["line",7,22],"dam",1, 2], # <--- dam interface
[["line",7,8],"wall",2, 0],[["spline3",8,9,10],"wall",2, 0],
[["spline3",10,11,12],"wall",2, 0],[["line",12,13],"wall",2, 0],[["line",13,14],"wall",2, 0],
[["line",14,15],"wall",2, 0], # <--- right boundary
[["line",15,16],"wall",2, 0],[["line",16,17],"wall",2, 0],
[["spline3",17,18,19],"wall",2, 0],[["spline3",19,20,21],"wall",2, 0],
[["line",21,22],"wall",2, 0],[["line",22,23],"wall",1, 0],
[["spline3",23,24,25],"wall",1, 0],[["spline3",25,26,27],"wall",1, 0],
[["line",27,28],"wall",1, 0],[["line",28,29],"wall",1, 0],
[["line",29,0],"wall",1, 0]] # <--- left boundary
for c,bc,l,r in curves:
geo.Append(c,bc=bc,leftdomain=l, rightdomain=r)
geo.SetMaterial(1,"upperlevel")
geo.SetMaterial(2,"lowerlevel")
[4]:
mesh = Mesh(geo.GenerateMesh(maxh=2))
mesh.Curve(3)
Draw(mesh)
Vectorial (dim=3) approximation space:¶
[5]:
order = 2
fes = L2(mesh,order=order,dim=3)
initial and boundary conditions¶
[6]:
U,V = fes.TnT() # "Trial" and "Test" function
h, hu, hv = U
# initial conditions
h0mat = {"upperlevel" : 10, "lowerlevel" : 2}
U0 = CoefficientFunction((CoefficientFunction([h0mat[mat] for mat in mesh.GetMaterials()]),0,0))
# boundary conditions
hbndreg = CoefficientFunction([{"wall" : h, "dam" : 0}[rg] for rg in mesh.GetBoundaries()])
hubndreg = CoefficientFunction([{"wall" : -hu, "dam" : 0}[rg] for rg in mesh.GetBoundaries()])
hvbndreg = CoefficientFunction([{"wall" : -hv, "dam" : 0}[rg] for rg in mesh.GetBoundaries()])
Ubnd = CoefficientFunction((hbndreg,hubndreg,hvbndreg))
# constant for gravitational force
g=1
Flux definition and numerical flux choice (Lax-Friedrich)¶
[7]:
def F(U):
h, hvx, hvy = U
vx = hvx/h
vy = hvy/h
return CoefficientFunction(((hvx,hvy),
(hvx*vx + 0.5*g*h**2, hvx*vy),
(hvx*vy, hvy*vy + 0.5*g*h**2)),dims=(3,2))
[8]:
n = specialcf.normal(mesh.dim)
def Max(u,v):
return IfPos(u-v,u,v)
def Fmax(A,B): # max. characteristic speed:
ha, hua, hva = A
hb, hub, hvb = B
vnorma = sqrt(hua**2+hva**2)/ha
vnormb = sqrt(hub**2+hvb**2)/hb
return Max(vnorma+sqrt(g*A[0]),vnormb+sqrt(g*B[0]))
def Fhatn(U): # numerical flux
Uhat = U.Other(bnd=Ubnd)
return (0.5*F(U)+0.5*F(Uhat))*n + Fmax(U,Uhat)/2*(U-Uhat)
DG formulation¶
We recall that a BilinearForm is allowed to be nonlinear in the first argument.
[9]:
def DGBilinearForm(fes,F,Fhatn,Ubnd):
a = BilinearForm(fes, nonassemble=True)
a += - InnerProduct(F(U),Grad(V)) * dx
a += InnerProduct(Fhatn(U),V) * dx(element_boundary=True)
return a
a = DGBilinearForm(fes,F,Fhatn,Ubnd)
Simple fix to deal with shocks: artificial diffusion:¶
[10]:
from DGdiffusion import AddArtificialDiffusion
artvisc = Parameter(1.0)
if order > 0:
AddArtificialDiffusion(a,Ubnd,artvisc,compile=True)
Visualization of solution quantities¶
[11]:
gfu = GridFunction(fes)
gfh, gfhu, gfhv = gfu
gfvu = gfhu/gfh
gfvv = gfhv/gfh
momentum = CoefficientFunction((gfhu,gfhv))
velocity = CoefficientFunction((gfvu,gfvv))
gfu.Set(U0)
Draw(momentum,mesh,"mom")
Draw(velocity,mesh,"vel")
Draw(gfh,mesh,"h")
Explicit Euler time stepping¶
[12]:
def TimeLoop(a,gfu,dt,T,nsamplings=100):
#gfu.Set(U0)
res = gfu.vec.CreateVector()
fes = a.space
t = 0; i = 0
nsteps = int(ceil(T/dt))
invma = fes.Mass(1).Inverse() @ a.mat
with TaskManager():
while t <= T - 0.5*dt:
res = invma * gfu.vec
gfu.vec.data -= dt * res
t += dt
if (i+1) % int(nsteps/nsamplings) == 0:
Redraw()
i+=1
print("\rt = {:.10}".format(t),end="")
Redraw()
[13]:
TimeLoop(a,gfu,dt=0.0004,T=3)
t = 3.0
You may play around with this example.
change the artificial diffusion parameter: How does it influence the solution
change boundary conditions: left boundary -> fixed height and non-reflecting
change the initial heights
introduce a (circular) obstacle below the dam
Generate output to create a video: To this end take a look at the final unit of this section.
[14]:
%%HTML
<video width="600" height="400" controls>
<source src="../../_static/shallow2D.mov">
</video>